|
| |


| Title: |
Cooperating/Coordinating
Hexapods via IRPD |
| Lead: |
Matt
Bauer |
| Advisors: |
Dr.
Juliano, Dr. Renner, Dr. Varahamurti |
|
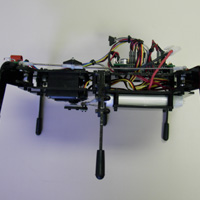
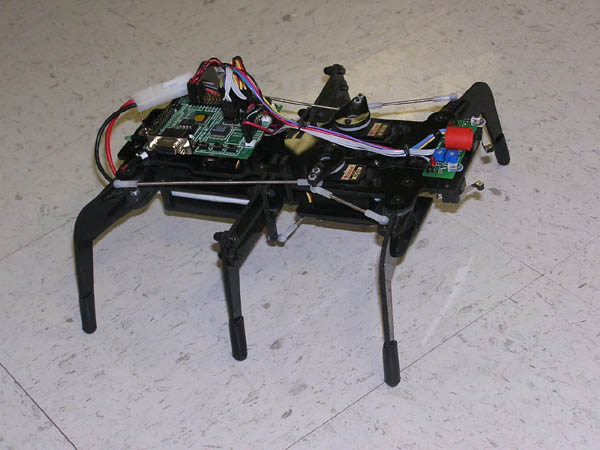
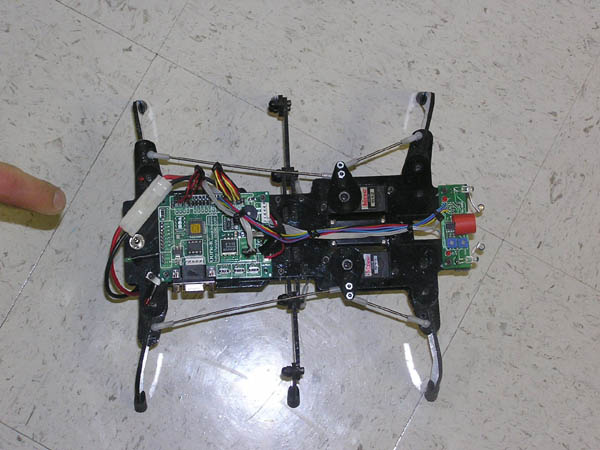
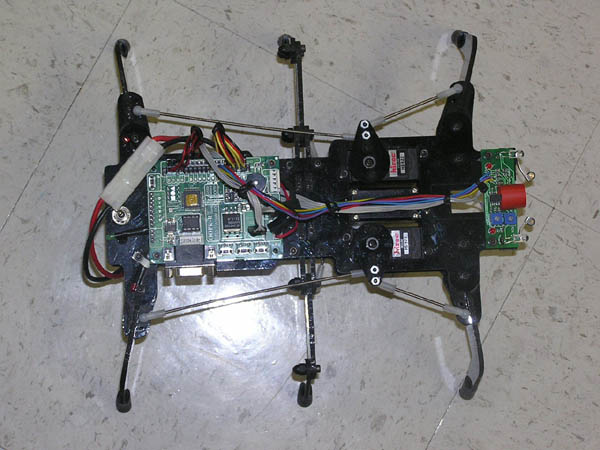
The objective of this project is to get two or more Hexapods
to
walk and navigate with IRPD sensors in the same environment.
Each Hexapod employs a two emitter and single collector IRPD
module.
The problem with the IRPD modules is that when two or more
Hexapods
outfitted with the same sensors are in the same environment,
signals emitted by each IRPD module affect the others around
it.
The solution used in this project is to code each emitted
signal
with a unique sequence of bits. Hence, a robot would emit
a unique
sequence of bits and only register an object/obstacle if
this
robot collects the same sequence of bits.
|
(click
on thumnail for larger view)
|
| |
|
Intelligent
Systems Laboratory |
O'Connell
Technology Center, OCNL 431 |
 |
Copyright
© 2003-2004 California State University, Chico. All
rights reserved. Last update 10/11/04 |
|
|