|
| |


| Title: |
CarpetRover-Style
Basketball |
| Lead: |
Matt
Bauer, Daniel Hirsmuller-Counts |
| Advisors: |
Dr.
Juliano, Dr. Renner |
|
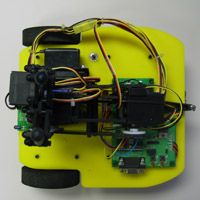
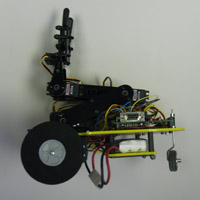
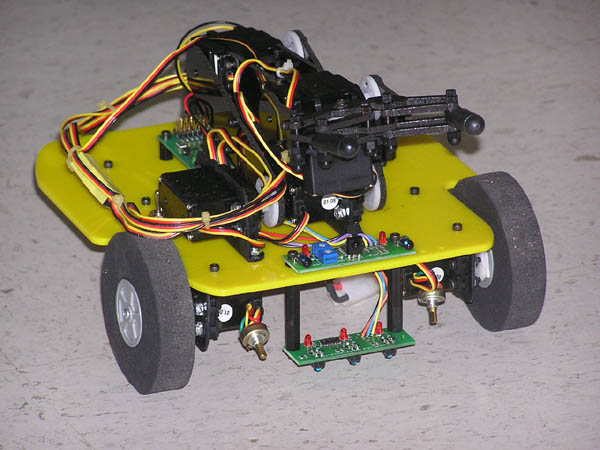
The Lynxmotion
Carpet Rover / Lynx 5 Combo Kits are two-wheeled robots
with an arm. There is a minor problem from the servos in
the kit not
being continuous rotation servos. A plastic stop inside each
servo has
to be cut off and the polarity of the left servo has to be
reversed by
unsoldering the wires to the motor, flipping them, and then
resoldering
the wires back to the motor. There were also problems with
the gripper
being unbalanced and the kit not having enough standoffs
to mount both
the IRPD and the line following modules. Code was written
to test
movement with the servos, obstacle avoidance with the IR
sensor, line
following with the line following module, and picking up
an object
with the robotic arm. The servos and the IRPD module were
the easiest
to test. The line following module seems to be pre-calibrated
and relies
strongly on having a white surface with a black line.
Tests show that the line following module is calibrated to
be much too
sensitive to the white level that anything even slightly
off-white
is registered as black. The spacing of the sensors on the
line
following module is very good for this particular robot,
and the middle
sensor allows the robot to detect a “T” in the
line with great ease.
The arm seemed to be the most complicated Carpet Rover
part to program.
All the servos for the arm are controlled by a servo controller
through
a serial input and clock line.
Although it is relatively easy to create and send the correct
serial
packets to the arm servos, care must still be taken so
as not to move
the arm in such a way as to damage either the arm or the
robot.
The next phase is to program the Carpet Rovers to play
a simple form
of basketball.
|
(click
on thumnail for larger view)
|
| |
|
Intelligent
Systems Laboratory |
O'Connell
Technology Center, OCNL 431 |
 |
Copyright
© 2003-2004 California State University, Chico. All
rights reserved. Last update 10/11/04 |
|
|