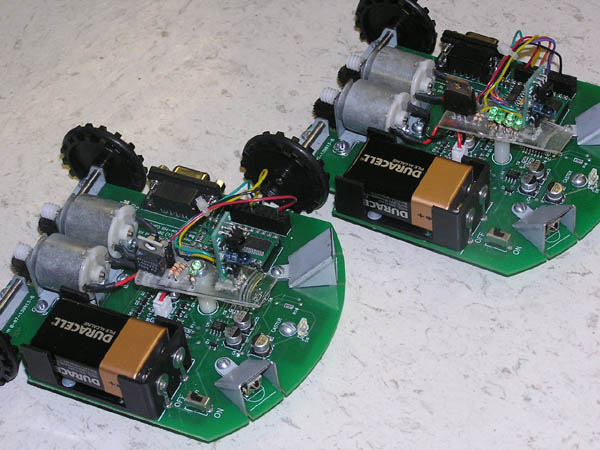
The ISL has a number of TAB Electronics Build Your Own Robot
Kits
(a.k.a. BYORKs) powered by NetMedia BasicX-24 microcontrollers
(BX24).
The BYORKs are typically controlled by a Parallax Basic Stamp
2 module
(BS2), the microcontroller for which this robot platform was
designed
to operate with. Out of the box, the BYORK is designed to be
used with
the BS2. One can use the BS2 to control all the actions of
the BYORK by
using the standard communication protocol of the PBasic language.
The BX24 is a more superior microcontroller than the BS2.
For example,
the BX24 has 32KB of EEPROM, 400 bytes of RAM, executes 65000
instructions per second, and has a maximum program length
of 8000+
instructions; whereas, the BS2 has only 2KB of EEPROM, 32
bytes of RAM,
executes 4000 instructions per second, and has a maximum
program length
of about 500 instructions. Both the BX24 and the BS2 are
packaged as
24-pin DIP modules.
Onboard the BYORK is a Microchip PIC 16C505 microcontroller
that has
built in capabilities for controlling the BYORK’s
motors, infrared
module and the CDS photocells. Also coded on the co-processor
are four
behaviors. These four behaviors, and the values associated
with the
infrared module and photocells, can be easily called from
and controlled
by a BS2; this was not the case for the BX24. The BX24 had
a similar set
of communication protocols, but they were too fast that the
BX24 was
communicating faster than the PIC coprocessor could perform
any tasks.
Dr. Juliano and Matt Bauer ventured to create a new communication
protocol for the BX24 that will allow it to send and receive
data from
the BYORK’s co-processor. The resulting BX24_byork
module, based on
the BS2 template written by Myke Predko for the BYORK, has
been fully
tested to get all the data and send all the commands needed
to fully
control the BYORK from a BX24. The BX24_byork.bas module,
and a
complete Basic Express project (FourBehaviors.bxp) implementing
the
four default BYORK behaviors, has been released for public
use.